Autonomous Drifting RC Car
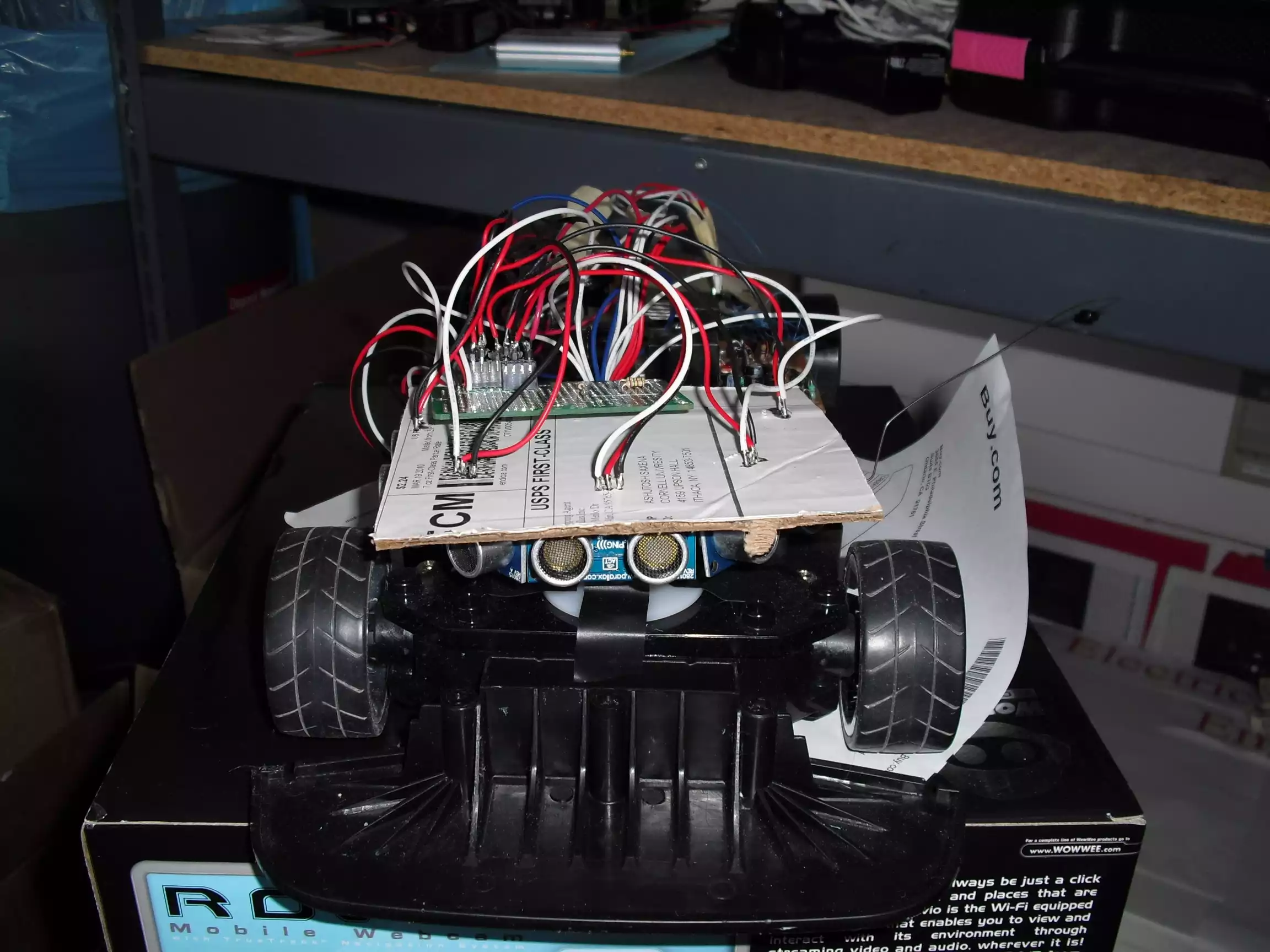
As part of a project for the machine learning lab at Cornell, I did the hardware and some of the software to make a stock RC car autonomously drift though a track.
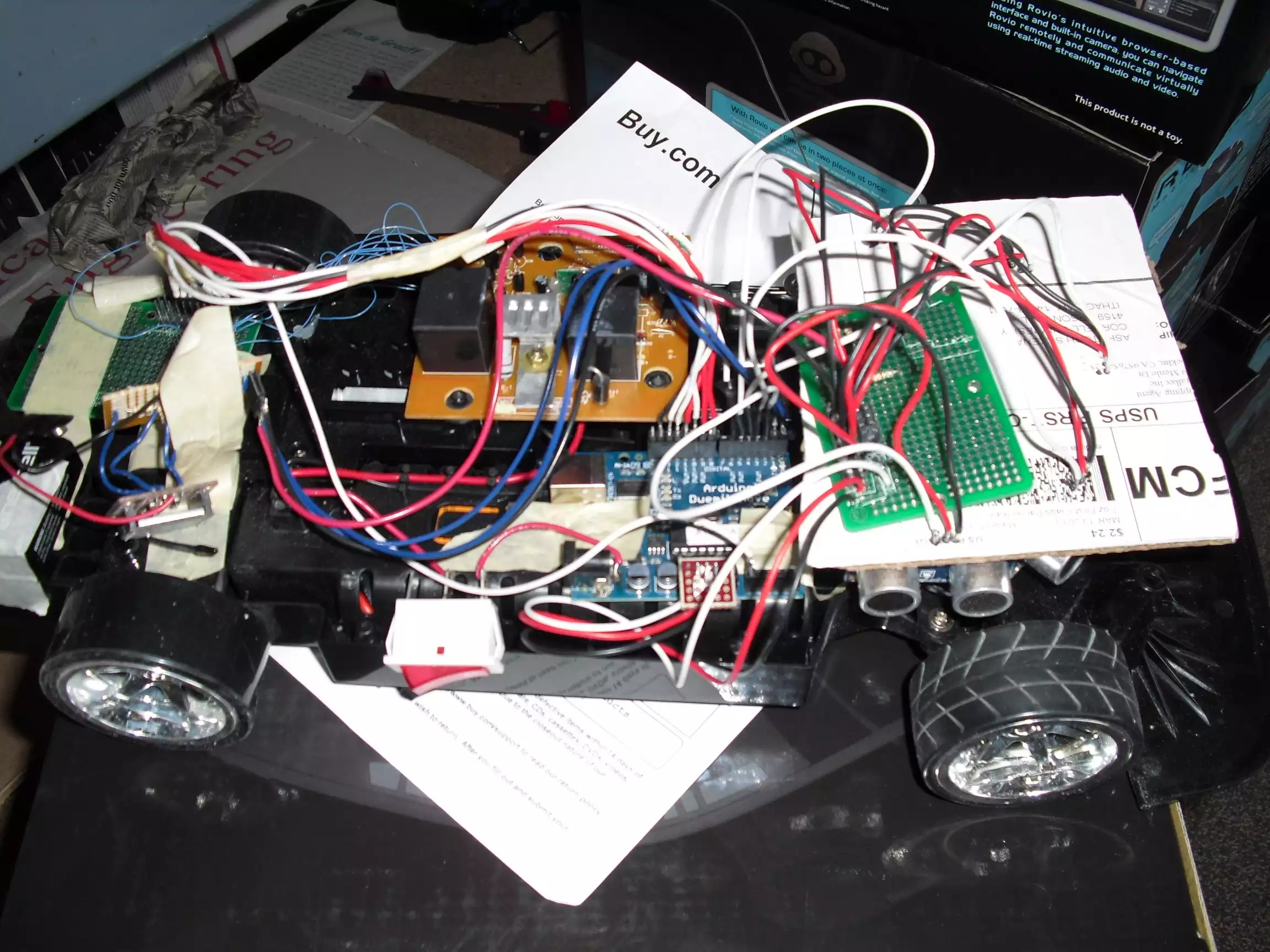
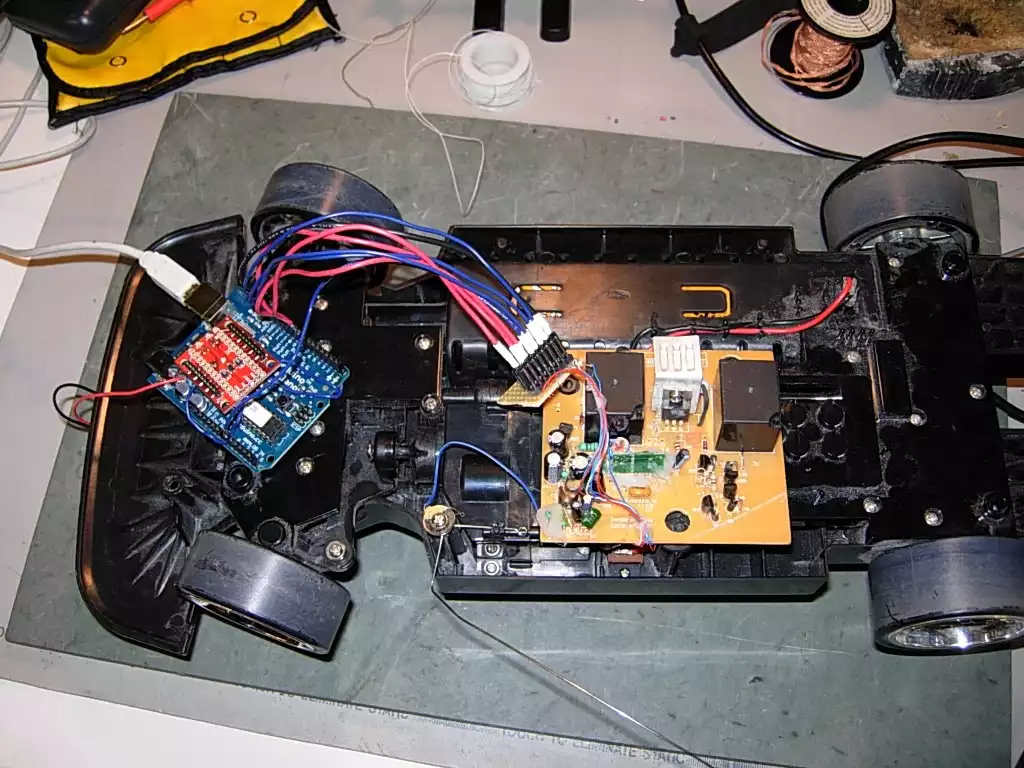
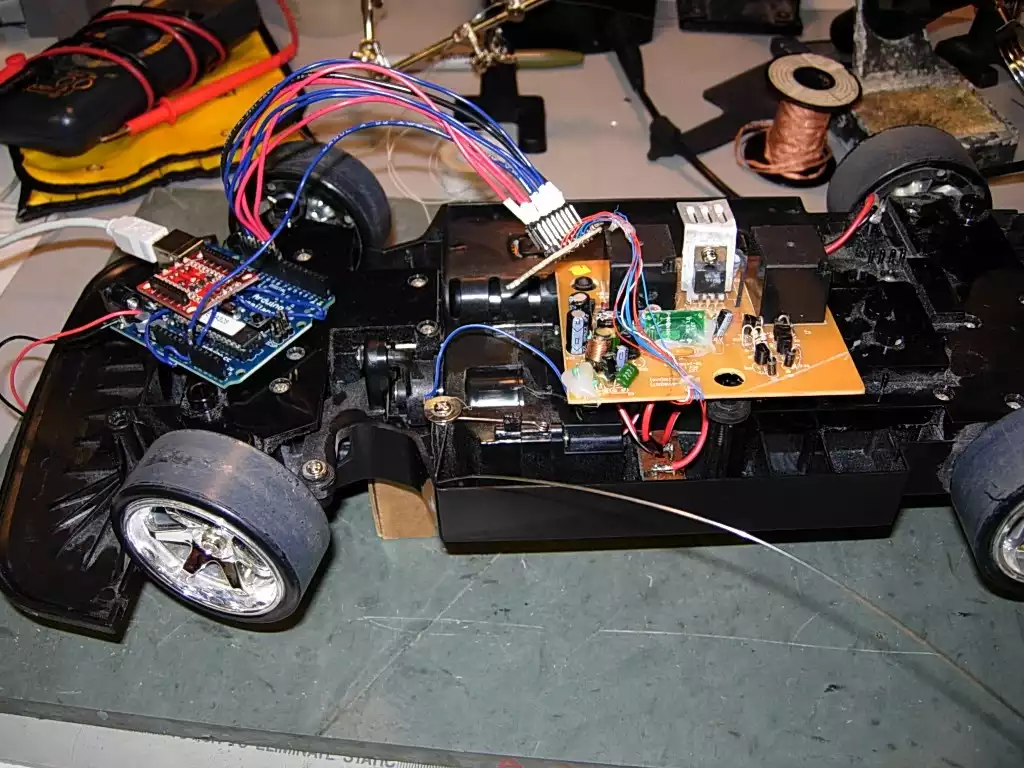
The microcontroller that drove the car from the remote control was put on a switch with an Arduino. The Arduino was connected to an XBEE wireless transceiver. The Arduino would process the sensor data and control the motors, relaying the information to a PC. The Arduino used a PID controller to navigate a pre-mapped course.
Here are some more pictures